1 System principle and structural framework
It is one of the goals pursued by the automotive industry to maximize the safety of drivers and passengers in the event of an accidental collision. The design of this automatic positioning alarm system adopts Atmega128 MCU as the central processor of the whole system, which is connected with MEMS acceleration sensor, GPs positioning module and GSM communication module. You can automatically dial an emergency number after a car accident to inform the relevant department of the precise location and time of the car accident, so that it can dispatch a rescue team as soon as possible to fight for the injured to save more time and save more lives.
Once the MEMS acceleration sensor detects an acceleration change, Atmega128 will analyze and process this data. If it is judged that a car accident has occurred, the GSM module will send the positioning information received by the GPS to the relevant departments in the form of texting or making a call Quickly dispatch an emergency team to carry out rescue work; otherwise, the system automatically resets and performs loop detection. System block diagram shown in Figure 1.

2 Main hardware modules
2.1 MEMS acceleration sensor module
Acceleration sensor is an electronic device capable of measuring acceleration force. There are two types of angular accelerometer and linear accelerometer. The model of MEMS acceleration sensor used in this system is ADX L202JE. This sensor etched a polycrystalline silicon surface micromechanical sensor in the same silicon chip, and integrated a set of precision information processing circuit, as shown in Figure 2.
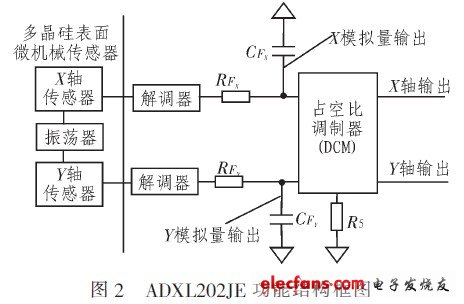
The sensor is mainly composed of a polysilicon mechanism using surface micromachining and a differential capacitor. Under the effect of acceleration, the polysilicon structure will shift to change the capacitance value. In the signal processing circuit, the change signal of the differential capacitor is demodulated by the modulator and sent to a duty cycle modulator through an RC filter (consisting of internal RFx and external CFx, RFx), which is converted into a duty cycle by the modulator The square wave whose ratio is proportional to acceleration, the period of the square wave (T2) can be determined by Rs. This square wave can be sent directly to the single-chip microcomputer for processing, by using a counter to measure the square wave period T2 and pulse width T1 (Figure 3), thereby obtaining the acceleration value.
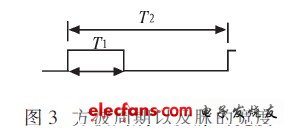
Acceleration: a = (T1 / T2-Uog) / Ulg
In the formula: T2 is determined by the external resistor Rs, and the relationship is T2 = Rs / 125MΩ; Uog is the duty cycle corresponding to 0g, and its deformation value is 50%; Ulg represents the change value of the duty cycle caused by the change of lg acceleration For ADXL202JE, the typical value of lg is 12.5%.
2.2 GPS positioning module
GPS (Global PosiTIoning System) is the most widely used satellite navigation and positioning system at present, with convenient use and low cost. The main features of the global positioning system are: global, all-weather, continuous and real-time navigation, positioning and timing functions.
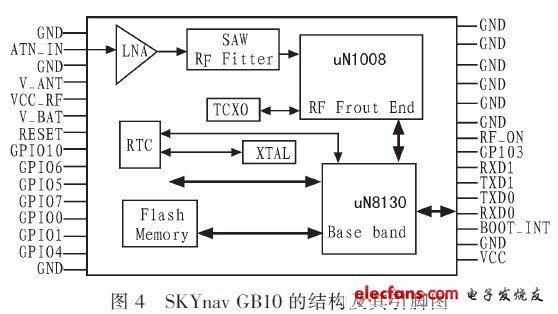
This module uses SKYnav GB10, the structure and its pins are shown in Figure 4. The module has the characteristics of low power consumption, anti-interference ability and strong anti-occlusion ability. It has 12 data parallel receiving channels, including 8 data bits, 1 start bit, 1 stop bit, no correction bit, output power The level is CMOS level and the current is 1mA. The communication method is asynchronous serial communication, and the circuit connection method is very simple. Simply connect the TXD0 and RXD0 pins of this module to the RXD0 and TXD0 pins of the single chip microcomputer respectively, and data transmission can be performed. The default communication rate is 4 800 b / s, the receiving frequency is 1575.42 ± 1.0MHz.
Light Power Box,Aluminum Extrusion Box,Aluminum Light Enclosure,Extrusion Enclosure Support
Dongguan Formal Precision Metal Parts Co,. Ltd , https://www.formalmetal.com