Analyze the control strategy of wearable power assisted robots. According to the purpose of the research and the particularity and complexity of the human body structure and function, the lower limbs assisted robot control method based on the bone-muscle function model is proposed by appropriately simplifying the lower limbs and the necessary hypothesis. The method is adopted in the bone-muscle model. The adjustment of the elastic modulus and damping coefficient can provide support for the lower limb movement of the human body. At the same time, the motion prediction of the lower limbs of the human body is realized through the information of the interaction between the human and the machine.
The use of machines to enhance the strength and perception of human muscles while preserving human flexibility and direct manipulation is one of the areas of robotics research. All movements of the human body are related to force and its control. The assist system uses a specific device to provide some force compensation, reduce the energy consumption of the person, or provide treatment or orthopedics to those who have abnormal sports behavior.
According to different power-assisting objects, wearable power-assisted robots can be divided into two categories: 1) direct type: directly provide power to the user, such as limb assist, back power and upper limb assist. In this case, the movement of the power assist device is required. Leading to the corresponding movement of the human body. 2) Indirect: Share the user's labor load, such as carrying heavy objects, moving goods, etc., so as to reduce the labor intensity of the user. This mode requires the machine to move synchronously with the user.
Since the power assisting device is basically a rigid body, the overall flexibility is poor, so that the movement of the person and the device may cause inconsistency and unnaturalness, which involves the determination of the joint degree of freedom and the driving problem. In motion recognition, most foreign countries use EMG information as a method for detecting human motion information. This requires understanding the functions of various muscle masses of the human body and selecting the muscle mass that best reflects the movement of the human body. However, many movements usually rely on muscle groups. To complete, the tightening and relaxation of a muscle can not complete all the actions, which brings great difficulty to the placement of the electrode and the extraction of the signal. The myoelectric signal is the physiological reflection of the human body, and it will be affected by the human condition and environmental factors. The effects, such as the secretion of sweat, thick clothes, elastic and so on. Through the analysis of the research status of wearable power-assisted robots at home and abroad, combined with the research results of multi-dimensional force sensors, the motion information acquisition method based on human-machine interaction information and the control method of muscle function model are proposed.
1 Description of human movement and simplified human model

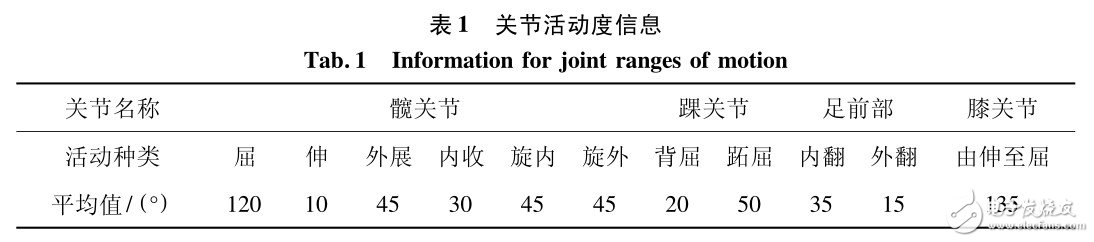
People are the dominant factor in the human-machine-environment system. In the detection of human motion position, high-speed camera field shooting is the most common method. Since this method is a non-contact type of recording, it does not affect the actual movement of the person, and most accurately reflects the actual movement of the person. For the study of this paper, the above detection system is too large and subject to space constraints, obviously not applicable. Therefore, the use of a practical and simple motion information detection system is a necessary part of the study. From the research method, the research on the object is inseparable from the reasonable abstraction of the object. When analyzing various actions, the posture analysis, especially the relative position analysis between the various parts of the human body is the key, and the joint points of the specific moment will be When the positions are connected, a stick-like chain structure can be formed, and the lower limb of the human body can be simplified into a multi-rod multi-joint stick chain structure, that is, a system with limited motion freedom, as shown in Fig. 1, with this structure as The computational model performs kinematic and dynamic analysis of the motion and overall motion of various parts of the human body. Table 1 shows the information of each joint activity.
2 motion analysis
The coordinated flexion and extension movement of the hip joint and the knee joint is the premise of realizing the walking function of the human body, and the assisting leg of the assisting robot can be regarded as a series mechanism. It is made up of a series of connecting rods connected in series by rotating joints. Through autonomous trajectory planning, the assisting mechanism can perform actions similar to biped robots, such as walking, crossing obstacles, and the like. Table 2 shows the D-H parameters and joint variables for each rod.

From the parameters in Table 2, the pose matrix of the end can be found:
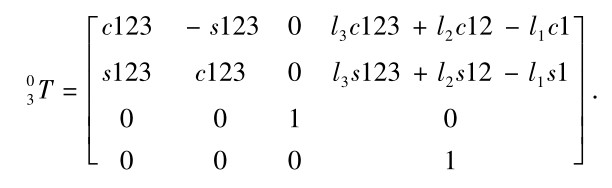 (1)
(1)
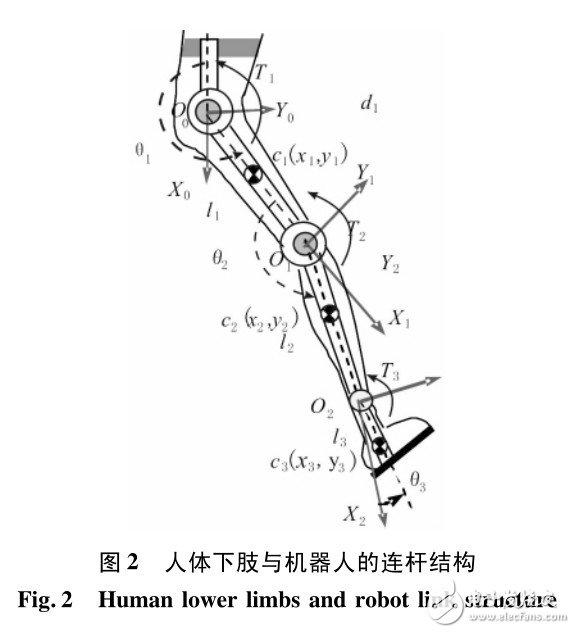
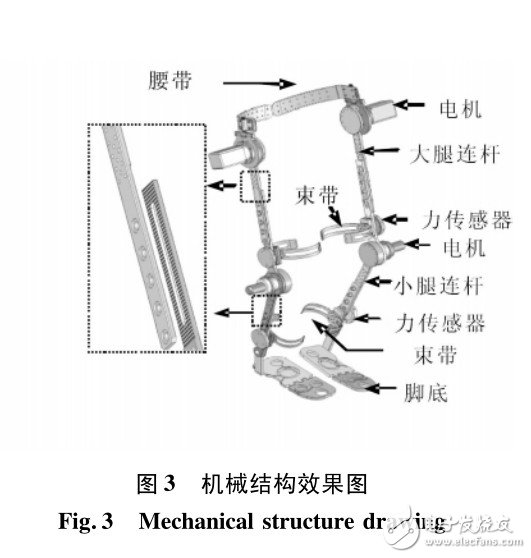
When the walking assisting robot provides 100% power, this means that the power assisting robot system is completely a loader. For the lower limb assisting robot, the human lower limb is the load, and the lower limbs of the human body are dispersed on the connecting rods of the device. This is different from a normal operating arm robot (load is mainly concentrated at the end). Figure 2 shows the hybrid diagram of the lower limbs and the robot, and Figure 3 shows the mechanical structure of the robot. From the parameters in Figure 2, the second-order Lagrangian method is used to obtain the dynamic equations of the moments T1 and T2 at the hip and knee joints:
 (2)
(2)
Where: The D factor is a function related to mass, velocity, acceleration, etc.
Our Food Choppers have 0.6L, 1.2L and 1.8L three capacities. 0.6L food choppers are a mini size, which is very suitable for chopping vegetables and herbs.
Description for 0.6L Food Choppers
Power: 250W/300W/350W
with plastic bowl
1 speed easy to control
Safety lock protection
Anti-slip rubber feet
20pcs/ctn

0.6L Food Choppers
0.6L Food Choppers,0.6L Electric Food Chopper,Hand Blender With Chopper,Electric Veggie Dicer Chopper
Flying Electronic Co., Ltd , https://www.flyingelectronic.com